Daten des Dobot Magician als Zusammenfassung:
| Technische Daten | |
| Number of Axes | 4 |
| Payload | 500 g |
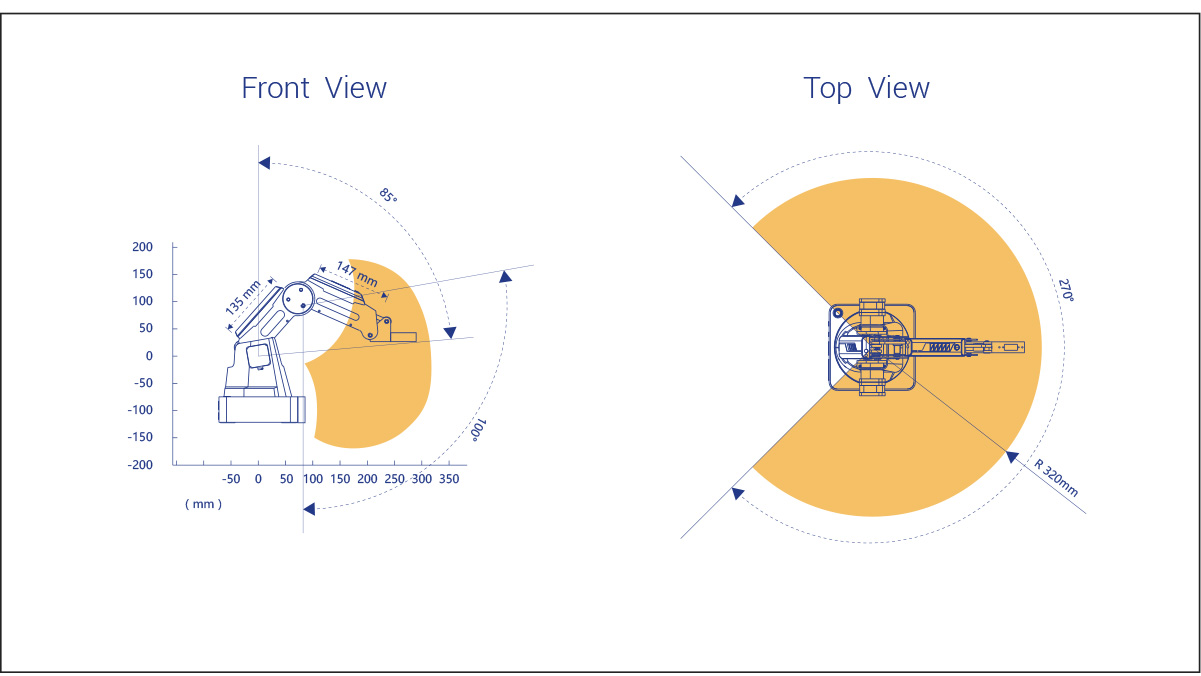
| Max. Reach | 320mm |
| Position Repeatability(Control) | 0.2 mm |
| Communication | USB /WIFI */ Bluetooth |
| Power Supply | 100V – 240 V, 50/60 Hz |
| Power In | 12 V / 7 A DC |
| Consumption | 60W Max |
| Working Temperature | -10°C-60°C |
| Achsenbewegungen | ||
| Axis | Range | Max Speed(250g workload) |
| Joint 1 base | -135° to +135° | 320° / s |
| Joint 2 rear arm | 0° to +85° | 320° / s |
| Joint 3 forearm | -10°to +95° | 320° / s |
| Joint 4 rotation servo | +90° to -90° | 480° / s |
| Allgemeine Informationen | |
| Net Weight | 3.4KG |
| Gross weight ( Standard Version) | 7.2KG |
| Gross weight ( Education Version) | 8.0KG |
| Base Dimension(Footprint) | 158mm × 158mm |
| Materials | Aluminum Alloy 6061, ABS Engineering Plastic |
| Controller | Dobot Integrated Controller |
| Robot Mounting | Desktop |
| Packing Size (L × W × H) | 307mm × 224mm × 330mm |
| Carton Size for Standard Version (L × W × H) | 340mm × 300mm × 400mm |
| Carton Size for Education Version (L × W × H) | 345mm × 290mm × 485mm |
| Apps | |
| Software | DobotStudio, Repetier Host, GrblController3.6, DobotBlockly (Visual Programing editor) |
| SDK (Software Develop Kit) | Communication Protocol, Dobot Program Library |
| Extensible I/O Interfaces | 1. I/O × 10 (Configurable as Analog Input or PWM Output) |
| 2. Controllable 12V Power output × 4 | |
| 3. Communication Interface (UART, Reset, Stop, 12V, 5V and two I/O included) | |
| 4. Stepper × 2 | |
| Werkzeuge (am Roboterarm) | ||
| 3D printer Kit | Print Size (L × W × H) | 150 mm ×150 mm × 150mm |
| Material | PLA | |
| Resolution | 0.1mm | |
| Laser* | Power Consumption | 500mw |
| Type | 405 nm (Blue laser) | |
| Power | 12V, TTL trigger (With PWM Driver) | |
| Pen Holder | Pen Diameter | 10mm |
| Vacuum Suction Cap | Cap Diameter | 20mm |
| Pressure | -35 Kpa | |
| Gripper | Range | 27.5mm |
| Drive Type | Pneumatic | |
| Force | 8N | |