Folgend wird erklärt wie einfache Objekte, mit Hilfe der Teach & Playback Funktion, mit dem Saugkopf bzw. dem Greifer angesaugt bzw. gegriffen werden können. Zuerst werden das Greifer Kit und das Saugkopf Kit erklärt.
1. Luftpumpen-Kit
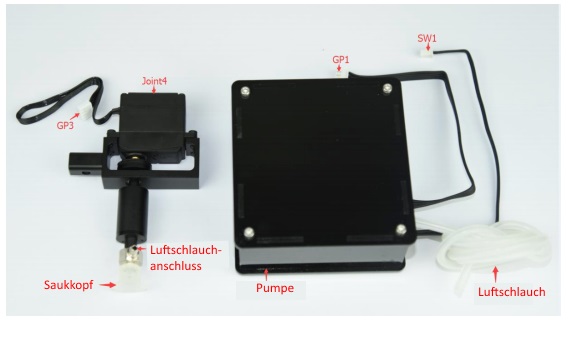
Beschreibung des Saugkopfs und der Pumpe:
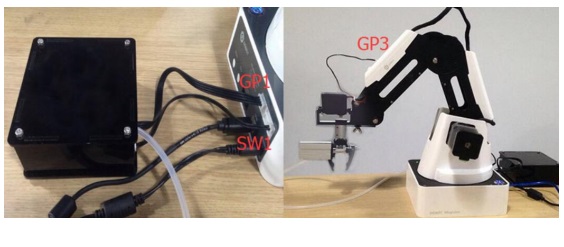
Luftpumpen-Kit anschließen:
- Das Stromversorgungskabel SW1 von der Pumpe an den Anschluss SW1 am Dobot anschließen. Den GP1 Anschluss von der Pumpe an den GP1 Anschluss am Dobot anschließen.
- Den Saukkopf mit der Schraube an den Dobot Arm festschrauben.
- Den Luftschlauch an dem Saugkopf anschließen.
- GP3 Anschluss vom Joint4 Servo an dem GP3 Anschluss an den Anschlüssen Am ForeArm des Dobots anschließen.
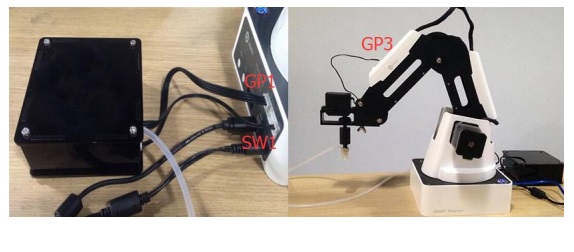
Bildliche Darstellung der Anschlüsse:
2. Pneumatischer Greifer:
- Pneumatischer Greifarm Aufsatz:

- Auch der Greifer wird mittels der Pumpe betrieben. Daher muss der Saugkopf von dem Servo Joint4 abmontiert werden. Mit Hilfe des beiliegenden Sechskantschlüssels kann die mit folgenden Bild markierte Schraube lösen:
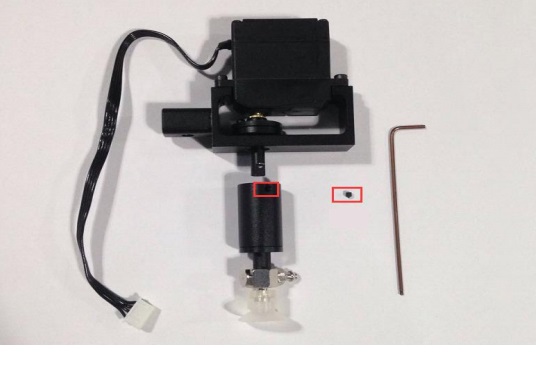
- Mit Hilfe der markierten Schraube kann nun der Greifer am Servo Joint4 festgeschraubt werden:
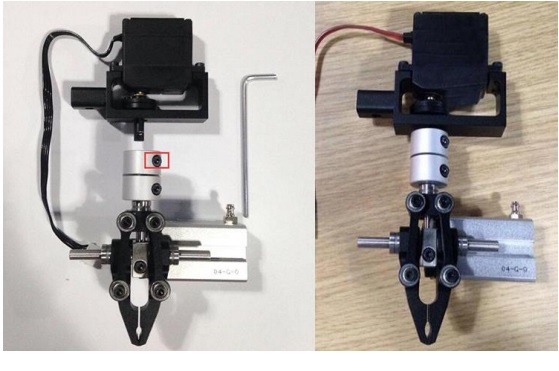
- Der Greifer wird genau wie der Saugkopf durch den Luftschlauch mit der Pumpe verbunden.
- Bildliche Darstellung der Verbindung:
3. Demonstatrion der Teach & Playback Funktion
Nach der Software Einführung folgt jetzt die Erste Anleitung zur Bewegung des Dobots.
Mit Hilfe der Teach & Playback Funktion soll ein kleines Objekt bewegt werden.
- Wählen Sie SuctionCup (Saugkopf) als Aufsatz in der Software aus und JUMP als Bewegungsmodus.
- Platzieren Sie ein kleines Objekt in dem Bewegungsfeld des Dobots (am Besten markieren Sie diesen Punkt um das Objekt später exakt auf die gleiche Position zu legen). Bewegen Sie den Dobot mit Hilfe der Kontrollflächen auf dem „Operation Panel“ (Bereich 2), direkt über das Objekt, sodass es durch den Saugkopf angesaugt werden kann. Nun wählen Sie das Kästchen mit SuctionCup aus, sodass der Saugkopf aktiviert wird und das Objekt ansaugt.
- Klicken Sie +Point um den Punkt zu speichern.
- Klicken Sie Z+ um den Dobot mit dem Objekt am Saugkopf nach oben zu bewegen.
Dann platzieren Sie das Objekt an einer anderen Stelle. Dazu entfernen Sie das Häckchen in dem Kästchen SuctionCup. - Wählen Sie erneut +Point um den Punkt zu speichern.
Nun legen Sie das Objekt wieder auf den vorher markierten Startpunkt. Wählen Sie nun Start aus um den Dobot die Bewegung erneut ausführen zu lassen.
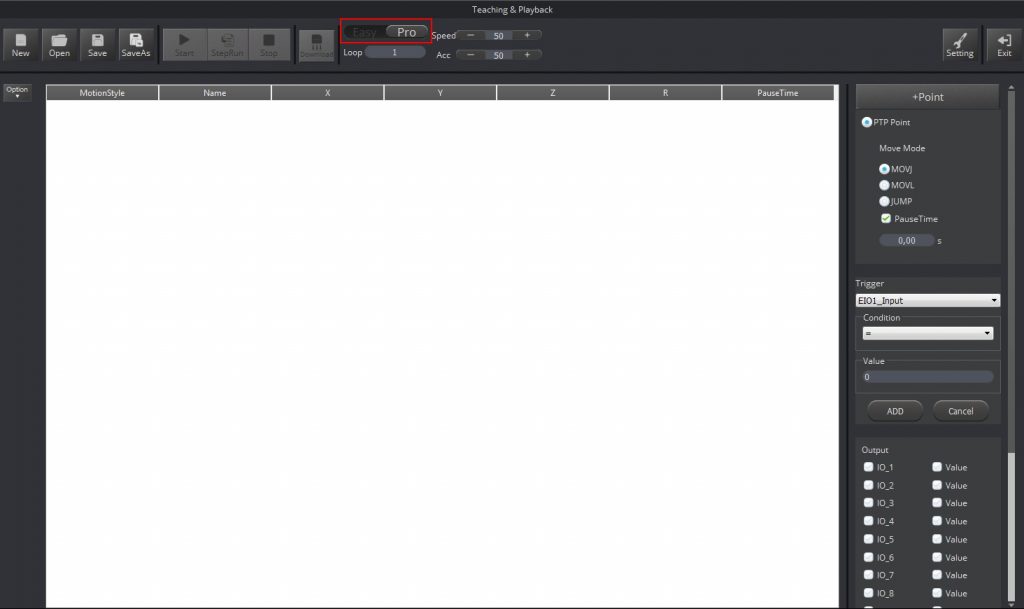
4. Erweiterte Funktionen der Teaching & Playback Oberfläche
Sie können durch Drücken der Easy/Pro Taste zwischen den beiden Modi umschalten:
4.1 StepRun
- StepRun: Drücken Sie diese Taste um den ersten gespeicherten Punkt anzufahren. Drücken Sie diese Taste erneut um den nächsten Punkt anzufahren usw.
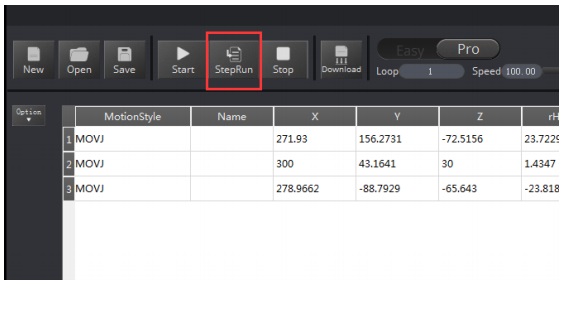
- Klicken Sie Stop um dem StepRun Modus wieder auszuschalten.
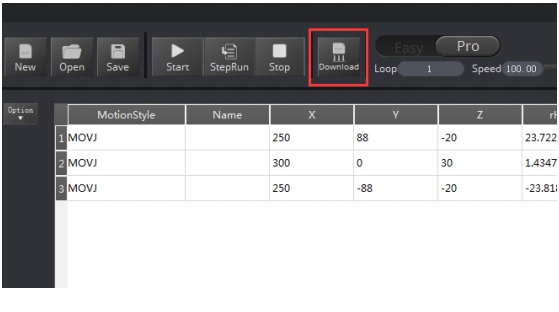
4.2 Offline Modus
- Wählen Sie Download aus um die aktuelle Positionsliste auf dem Dobot zu speichern. So können diese auch ohne USB Verbindung vom Dobot ausgeführt werden.
- Hinweis: Bevor man den Dobot die Offline Positionsliste ausführen lassen kann, muss die Home Taste in der Software betätigt werden.
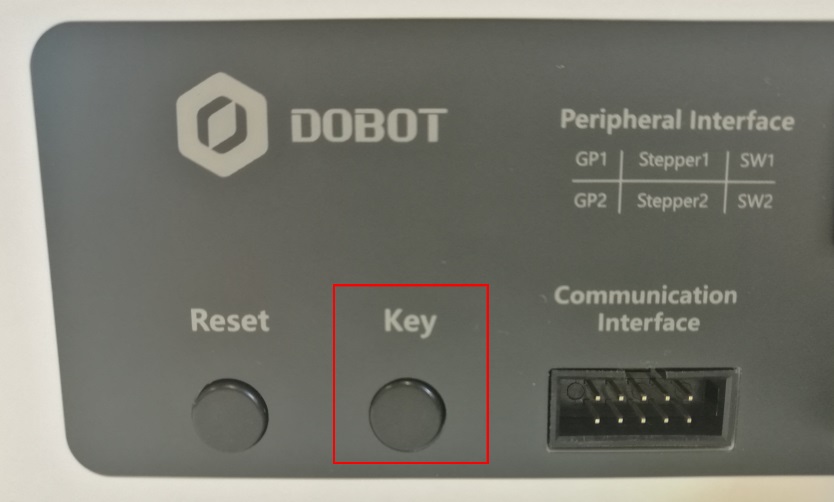
- Nachdem Sie die Liste auf dem Dobot gespeichert haben, entfernen Sie das USB Kabel. Drücken Sie die Key Taste an dem Dobot um die gespeicherte Positionsliste auszuführen. Drücken Sie die Key Taste erneut um die Ausführung zu stoppen. Halten Sie die Key Taste 2s gedrückt um die gespeicherte Positionsliste auf dem Dobot wieder zu löschen.